
As urbanization accelerates, the demand for efficient and aesthetically pleasing green spaces has surged. Industrial robots, particularly those designed for lawn maintenance, are becoming indispensable in managing small, intricate urban lawns. This study focuses on optimizing drilling torque parameters for an industrial robot equipped with a twist drill, aiming to enhance operational efficiency and reduce energy consumption.
1. Introduction
Industrial robots are revolutionizing agriculture and landscaping by automating labor-intensive tasks. In lawn maintenance, soil aeration through drilling is critical to alleviate compaction, promote root growth, and improve water infiltration. Traditional manual or semi-automated tools are inefficient for small, obstacle-rich lawns, necessitating lightweight, autonomous industrial robots. Our research addresses this gap by investigating how drilling parameters (hole diameter, depth), soil moisture, and soil hardness influence peak drilling torque. These insights directly inform the design of energy-efficient drilling systems for industrial robots.
2. Materials and Methods
2.1 Torque Testing Platform
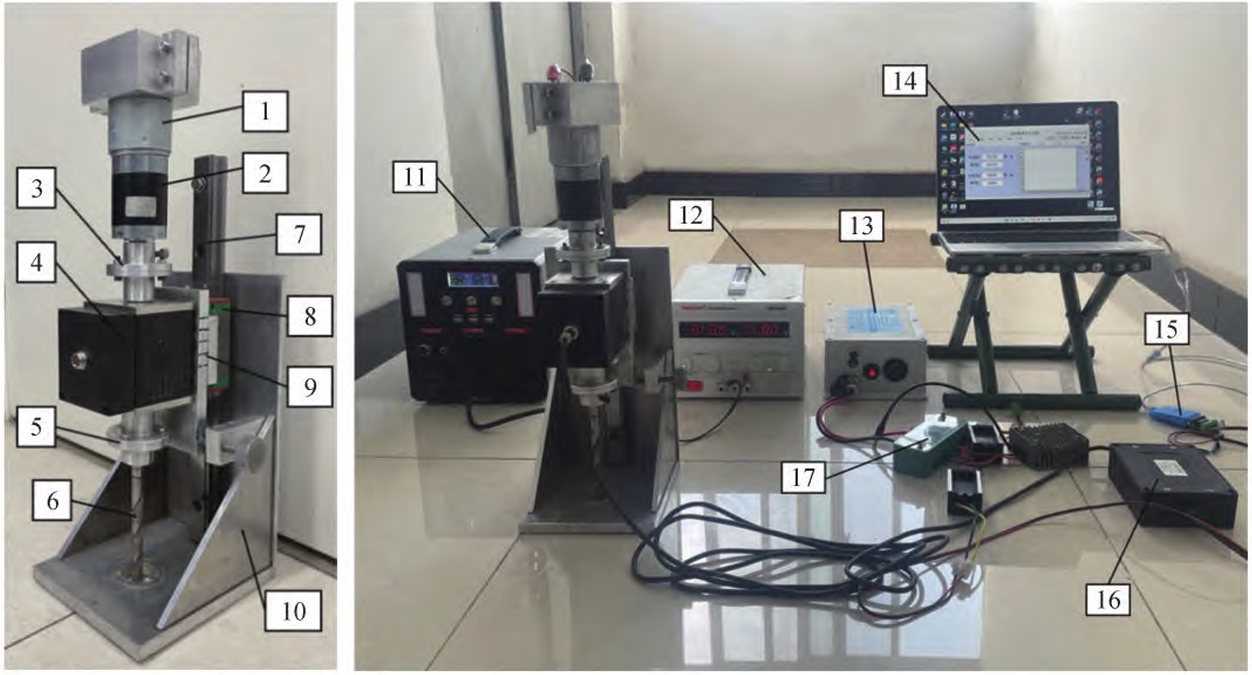
We developed a customized drilling torque test bench to simulate real-world conditions (Table 1). The system integrates:
- Power Transmission Unit: A 24V DC motor paired with a planetary gear reducer (51:1 ratio) to ensure stable torque output.
- Torque Measurement Unit: A dynamic torque sensor (0–50 N·m range, ±0.3% accuracy) connected to a data acquisition system.
- Vertical Motion Mechanism: A linear module enabling precise depth control (6–10 cm).
Table 1. Technical specifications of the drilling torque test bench
| Parameter | Value |
|---|---|
| DC motor voltage | 24 V |
| Gear reducer ratio | 1:51 |
| Average drilling power | 28 W |
| Maximum drilling depth | 10 cm |
| Torque sensor accuracy | ±0.3% |
2.2 Experimental Design
We conducted single-factor and multi-factor tests using a Box-Behnken design to evaluate four variables: soil moisture (4–28%), soil hardness (1–6 MPa), hole diameter (10–14 mm), and hole depth (6–10 cm). Over 300 datasets were collected under controlled field conditions.
Table 2. Single-factor test levels
| Level | Soil Moisture (%) | Soil Hardness (MPa) | Hole Depth (cm) | Hole Diameter (mm) |
|---|---|---|---|---|
| 1 | 4 | 1 | 6 | 10 |
| 2 | 8 | 2 | 7 | 11 |
| … | … | … | … | … |
3. Results and Analysis
3.1 Single-Factor Effects
- Soil Hardness: Peak torque increased linearly with hardness (R² = 0.8967).T=0.4597σ−0.5796T=0.4597σ−0.5796
- Soil Moisture: Torque decreased linearly with moisture (R² = 0.7913).T=−0.1018ω+2.758T=−0.1018ω+2.758
- Hole Depth: Torque rose with depth (R² = 0.7625).T=0.0595H+0.0108T=0.0595H+0.0108
- Hole Diameter: Larger diameters required higher torque (R² = 0.8641).T=0.0831D−0.3258T=0.0831D−0.3258
Table 3. Single-factor regression summary
| Factor | Relationship | R² |
|---|---|---|
| Soil hardness | Linear (+) | 0.8967 |
| Soil moisture | Linear (-) | 0.7913 |
| Hole depth | Linear (+) | 0.7625 |
| Hole diameter | Linear (+) | 0.8641 |
3.2 Multi-Factor Optimization
A quadratic model (R² = 0.9685) derived from Box-Behnken trials revealed interactions among parameters (Table 4). Key findings:
- Dominant Factors: Hole depth > soil moisture > hole diameter.
- Optimal Parameters:
- Minimum Torque (0.3 N·m): 28% moisture, 10 mm diameter, 6 cm depth.
- Maximum Torque (0.8 N·m): 20% moisture, 14 mm diameter, 10 cm depth.
Table 4. Multi-factor test results (selected)
| Trial | Moisture (%) | Diameter (mm) | Depth (cm) | Torque (N·m) |
|---|---|---|---|---|
| 1 | 24 | 12 | 8 | 0.47 |
| 2 | 20 | 14 | 10 | 0.75 |
| … | … | … | … | … |
4. Discussion
Industrial robots demand precise torque control to balance power efficiency and task performance. Our results align with prior studies on agricultural robotics, where soil properties significantly influence tool resistance. For instance, higher soil moisture reduces friction, lowering torque—a critical consideration for battery-powered industrial robots. Similarly, smaller drill diameters minimize energy use but must balance aeration efficacy.
The derived models enable predictive torque calibration, essential for dynamic motor selection in industrial robots. Future work could integrate real-time soil sensors to adapt drilling parameters autonomously, further enhancing robotic efficiency.
5. Conclusion
This study systematically quantifies the impact of drilling parameters on peak torque for industrial robot-based lawn maintenance systems. Key takeaways:
- Torque correlates linearly with soil hardness, hole depth, and diameter, but inversely with moisture.
- A multi-factor model (R² = 0.9685) reliably predicts torque (<4% error), enabling optimal motor selection.
- Energy-efficient configurations (e.g., 28% moisture, 10 mm drill) reduce power consumption by 62.5% compared to maximum-torque scenarios.
These insights provide a foundation for designing next-generation industrial robots capable of autonomous, energy-conscious lawn care.
6. Future Directions
- Sensor Integration: Embedding moisture and hardness sensors into industrial robots for real-time parameter adjustment.
- AI-Driven Optimization: Machine learning algorithms to predict torque under varying environmental conditions.
- Scalability: Testing larger drill diameters and depths for diverse lawn types.
By advancing these areas, industrial robots will achieve greater autonomy and efficiency, solidifying their role in sustainable urban landscaping.